Vad är auto singel en burk. CAN-buss i moderna bilar. Vad är CAN-buss
På det här ögonblicket Nästan varje modern bil är utrustad med omborddatorer, EBD, elektriska fönster och många andra elektroniska enheter. Nu kan sådan utrustning inte bara styra maskinens mekaniska utan också pneumatiska och hydrauliska system. Och även motorn klarar sig inte utan elektronik. Den innehåller en speciell enhet - en CAN-buss. Det är precis vad vi kommer att prata om idag.
Ursprungshistoria
Konceptet med en CAN-buss dök upp först på 80-talet av förra seklet. Sedan utvecklade det berömda tyska företaget BOSCH tillsammans med Intel en ny digital enhet för dataöverföring, som kallades Controller Area Network.
Vad kan hon göra?
Denna buss kan ansluta alla sensorer, block och kontroller som finns i bilen. CAN kan anslutas till startspärr, SRS, ESP, ECU, transmission och till och med krockkuddar. Dessutom är däcket i kontakt med fjädrings- och klimatsensorer. Alla dessa mekanismer är anslutna i duplexläge med upp till 1 Mbit/s. 
CAN bus: beskrivning och funktioner för enheten
Med all sin funktionalitet består denna mekanism av endast två ledningar och ett chip. Tidigare var CAN-bussen utrustad med dussintals pluggar för att ansluta till alla sensorer. Och om på 80-talet bara en signal sändes längs varje tråd, nu givet värde når hundratals.
Den moderna CAN-bussen utmärker sig också genom att den har funktionen att ansluta till mobiltelefon. En elektronisk nyckelbricka som fungerar som tändningsnyckel kan också kopplas till denna enhet och ta emot information från motorstyrenheten.
Det är viktigt att detta verktyg kan avgöra problem i maskinutrustningens funktion och i vissa fall eliminera dem. Den är praktiskt taget immun mot störningar och har bra kontaktisolering. CAN-bussen har en mycket komplex driftalgoritm. Data som överförs genom den i bitar omvandlas omedelbart till ramar. Ett 2-tråds varvpar fungerar som en informationsledare. Det finns också produkter tillverkade av fiberoptik, men de är mindre effektiva i drift och är därför inte lika utbredda som de första alternativen. Minst vanliga är CAN-bussen, som sänder information via en radiokanal eller
Funktionalitet och prestanda
För att förbättra prestandan hos denna enhet förkortar tillverkare ofta längden på sina kablar. Om bussens totala längd är mindre än 10 meter kommer informationsöverföringshastigheten att öka till 2 megabit per sekund. Vanligtvis, vid denna hastighet, överför mekanismen data från 64 elektroniska sensorer och styrenheter. Om fler enheter ansluts till bussen skapas flera kretsar för att ta emot och överföra information. 
För att hantera system konsekvent och harmoniskt och säkerställa kvaliteten och funktionen hos dataöverföring använder många fordonsföretag modernt system, känd som CAN-buss. Principen för dess organisation förtjänar noggrant övervägande.
generella egenskaper
Visuellt ser CAN-bussen ut som en asynkron sekvens. Dess information sänds över två tvinnade ledare, en radiokanal eller optisk fiber.
Flera enheter kan styra bussen samtidigt. Deras antal är inte begränsat, och informationsutbyteshastigheten är programmerad upp till 1 Mbit/s.
CAN-bussen i moderna bilar regleras av specifikationen "CAN Solution version 2.0".
Den består av två sektioner. Protokoll A beskriver överföring av information med hjälp av ett 11-bitars dataöverföringssystem. Del B utför dessa funktioner när du använder 29-bitarsversionen.
CAN har personliga klockgeneratornoder. Var och en av dem skickar signaler till alla system samtidigt. Mottagande enheter anslutna till bussen avgör om signalen är inom deras jurisdiktion. Varje system har maskinvarufiltrering av meddelanden adresserade till sig.
Sorter och märkning
En av de mest kända idag är CAN-bussen som utvecklats av Robert Bosch. CAN BUS (systemet är känt under detta namn) kan vara sekventiell, där puls ges puls för puls. Den heter seriebuss. Om information överförs över flera ledningar är detta en parallell buss. 
I - styrenheter;
II - systemkommunikation.
Baserat på typerna av CAN-bussidentifierare finns det två typer av markeringar.
I fallet när en nod stöder ett 11-bitars informationsutbytesformat och inte indikerar fel på 29-bitars identifierarsignaler, är den märkt "CAN2.0A Active, CAN2.0B Passive".
När sådana generatorer använder båda typerna av identifierare är bussen märkt "CAN2.0B Active".
Det finns noder som stöder kommunikation i 11-bitars format, men när de ser en 29-bitars identifierare i systemet visar de ett felmeddelande. I moderna bilar används inte sådana CAN-bussar, eftersom systemet måste vara logiskt och konsekvent.
Systemet arbetar med två typer av signalöverföringshastigheter - 125, 250 kbit/s. De förra är avsedda för hjälpanordningar (fönsterhissare, belysning), och de senare ger huvudkontroll (automatisk växellåda, motor, ABS).
Signalöverföring
Rent fysiskt är CAN-bussledaren i en modern bil gjord av två komponenter. Den första är svart och heter CAN-High. Den andra ledaren, orange-brun, kallas CAN-Low. Tack vare den presenterade kommunikationsstrukturen har många ledare tagits bort från bilkretsen. Vid tillverkning av fordon gör detta att vikten på produkten kan minskas till 50 kg. 
Den totala nätverksbelastningen består av olika blockresistanser som är en del av ett protokoll som kallas CAN-bussen.
Sändnings- och mottagningshastigheterna för varje system är också olika. Därför säkerställs behandling av olika typer av meddelanden. Enligt beskrivningen av CAN-bussen utförs denna funktion av en signalomvandlare. Det kallas den elektroniska gatewayen.
Denna enhet är placerad i utformningen av styrenheten, men kan utformas som en separat enhet.
Det presenterade gränssnittet används också för att mata ut och mata in diagnostiska signaler. För detta ändamål tillhandahålls ett enhetligt OBD-block. Detta är en speciell kontakt för systemdiagnostik.
Typer av bussfunktioner
Existera olika typer presenterad enhet. 
- CAN-buss för kraftenheten. Detta är en snabb kanal som sänder meddelanden med en hastighet av 500 kbit/s. Dess huvudsakliga uppgift är att kommunicera mellan styrenheter, till exempel transmissionsmotorer.
- Comfort-systemet är en långsammare kanal som sänder data med en hastighet av 100 kbit/s. Den länkar ihop alla Comfort-systemenheter.
- Buskommandoprogrammet sänder också signaler långsamt (100 kbit/s). Dess huvudsakliga syfte är att tillhandahålla kommunikation mellan tjänstesystem, såsom telefon och navigation.
När man studerar frågan om vad en CAN-buss är kan det tyckas att den sett till antalet program liknar ett flygplanssystem. Men för att säkerställa kvalitet, säkerhet och komfort vid körning kommer inga program att vara överflödiga.
Bussstörningar
Alla styrenheter är anslutna till CAN-bussen med transceivrar. De har meddelandemottagare, som är selektiva förstärkare.
Beskrivningen av CAN-bussen anger ankomsten av meddelanden längs hög- och lågledarna till differentialförstärkaren, där de bearbetas och skickas till styrenheten.
Förstärkaren bestämmer denna utsignal som skillnaden i spänning mellan hög- och lågtrådarna. Detta tillvägagångssätt eliminerar påverkan av yttre störningar.
För att förstå vad en CAN-buss är och dess struktur bör du komma ihåg dess utseende. Dessa är två ledare tvinnade ihop. 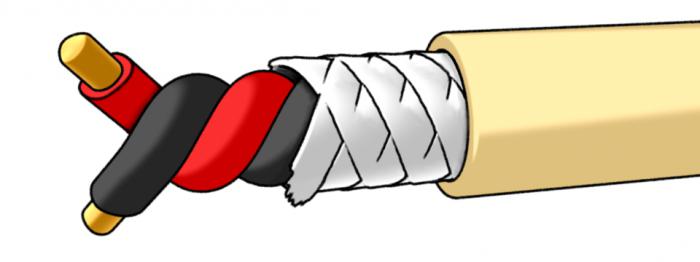
Eftersom interferenssignalen kommer till båda ledningarna samtidigt, subtraheras lågspänningsvärdet från högspänningen under bearbetningen.
Tack vare detta anses CAN-bussen vara ett pålitligt system.
Meddelandetyper
Protokollet möjliggör användning av fyra typer av kommandon vid informationsutbyte via CAN-bussen.
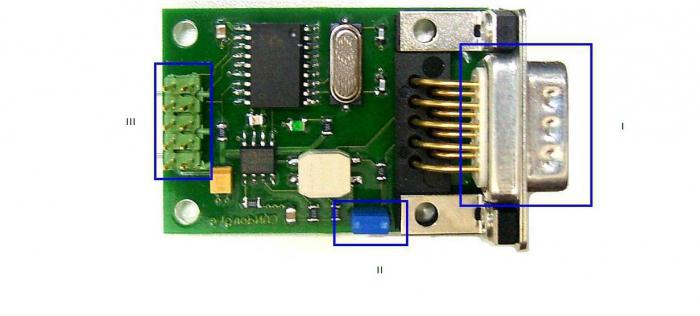
I - CAN-buss;
II - motståndsmotstånd;
III - gränssnitt.
I processen att ta emot och överföra information tilldelas en viss tid för en operation. Om det misslyckas genereras en felram. Error Frame varar också en viss tid. Den felaktiga enheten kopplas automatiskt bort från bussen när ett stort antal fel ackumuleras.
Systemets funktionalitet
För att förstå vad en CAN-bus är måste du förstå dess funktionella syfte.
Den är utformad för att sända realtidsramar som innehåller information om ett värde (till exempel en hastighetsändring) eller förekomsten av en händelse från en sändarnod till programmerade mottagare.
Kommandot består av 3 sektioner: namn, händelsevärde, tidpunkt för observation av variabeln.
Indikatorvariabeln fäster stor vikt vid. Om meddelandet inte innehåller tidsinformation, accepteras detta meddelande av systemet vid mottagandet.
När en kommunikationssystemdator begär en parameterstatusindikator skickas den i prioritetsordning.
Busskonfliktlösning
När signaler på bussen kommer till flera styrenheter väljer systemet i vilken ordning var och en ska behandlas. Två eller flera enheter kan börja fungera nästan samtidigt. För att säkerställa att ingen konflikt uppstår genomförs övervakning. CAN-bussen i en modern bil utför denna operation samtidigt som den skickar ett meddelande.
Det finns en gradering av meddelanden enligt prioritet och recessiv gradering. Den information som har det lägsta numeriska värdet av skiljedomsfältet vinner när en konflikt uppstår på bussen. De återstående sändarna kommer att försöka skicka sina ramar senare om inget ändras.
I processen att överföra information går den tid som anges i den inte förlorad även om det finns en konfliktsituation i systemet.
Fysiska komponenter
Bussanordningen består, förutom kabeln, av flera element.
Transceiverchips finns ofta från Philips, såväl som Siliconix, Bosch, Infineon.
För att förstå vad en CAN-buss är bör du studera dess komponenter. Ledarens maximala längd vid en hastighet av 1 Mbit/s når 40 m. CAN-bussen (även känd som CAN-BUS) är utrustad med en terminator i änden. 
För att göra detta installeras 120 Ohm motstånd i änden av ledarna. Detta är nödvändigt för att eliminera meddelandereflektioner i slutet av bussen och säkerställa att den tar emot lämpliga strömnivåer.
Själva ledaren, beroende på design, kan vara skärmad eller oskärmad. Ändmotståndet kan avvika från det klassiska och sträcka sig från 108 till 132 ohm.
iCAN-teknik
Tittar på däck fordon, bör uppmärksamhet ägnas åt motorblockeringsprogrammet.
För detta ändamål har datautbyte via CAN-bussen, iCAN-modulen, utvecklats. Den ansluts till den digitala bussen och ansvarar för motsvarande kommando.
Den är liten i storleken och fästs i valfritt däckutrymme. När bilen börjar röra sig skickar iCAN ett kommando till motsvarande block och motorn stannar. Fördelen med detta program är frånvaron av signalavbrott. Den elektroniska enheten instrueras, varefter meddelandet avaktiverar funktionen för motsvarande ställdon.
Denna typ av blockering kännetecknas av högsta sekretess och därmed tillförlitlighet. I detta fall registreras inte fel i ECU-minnet. CAN-bussen ger all information om fordonets hastighet och rörelse till denna modul.
Stöldskydd
iCAN-modulen installeras i vilken nod som helst där kabelnäten är placerade, där bussen är installerad. På grund av de minimala dimensionerna och den speciella algoritmen för åtgärder är det nästan omöjligt att upptäcka blockering med konventionella metoder när man begår en stöld.
Externt är denna modul förklädd som olika övervakningssensorer, vilket också gör den omöjlig att upptäcka. Om så önskas är det möjligt att konfigurera enhetens funktion för att automatiskt skydda bilfönster och speglar.
Om fordonet har en automatisk motorstart kommer iCAN inte att störa dess funktion, eftersom den utlöses när fordonet börjar röra sig.
Efter att ha blivit bekant med strukturen och principerna för datautbyte som CAN-bussen är utrustad med, blir det tydligt varför alla moderna bilar använder dessa tekniker när de utvecklar fordonskontroll.
Den presenterade tekniken är ganska komplex i sin design. Men alla funktioner som ingår i den kommer att säkerställa den mest effektiva, säkra och bekväma körningen.
Befintlig utveckling kommer att bidra till att säkerställa fordonsskydd även mot stöld. Tack vare detta, såväl som ett komplex av andra funktioner, är CAN-bussen populär och efterfrågad.
› Vad är CAN-buss?En modern bil, tyvärr eller lyckligtvis - det är upp till dig att bestämma, är inte längre samma låda på hjul, med ett dussin och en halv vajrar, som en mer eller mindre läskunnig person skulle kunna lista ut och till och med fixa om något gick sönder. ..
En modern bil är redan en dator på hjul, vare sig du vill det eller inte... Och även om du inte misstänker det, är det bara för att proffs reparerar din bil. Det är de som ska göra allt arbete på din bil. Följaktligen är det bättre att anförtro installationen av ytterligare utrustning till specialister.
När du diskuterar frågor om ytterligare bilsäkerhet måste du ofta "föreläsa" kunder och förklara, ibland under mycket lång tid, varför deras billarm inte ska ställas in på 1 timme, utan på minst 10 timmar, och ibland under en och en halv till två dagar. Och ofta i dessa samtal måste vi nämna en sådan fras som "Can tire", som ofta förvirrar kunder.
Så vad är CAN SHINA?
Och varför sitter den i bilen?
Först, svaret på frågan - varför?:
Hur sparar man koppar?:
Det uppskattas att under de senaste fem åren har antalet alternativ i en bil, som till största delen är konsumenter av elektrisk energi, fördubblats. Och detta hände inte alls efter biltillverkarnas infall, utan tack vare kundernas växande behov av komfort och lagliga krav för säkerhet och miljöskydd
Allt skulle vara bra, men möjligheterna med elektrisk utrustning är inte obegränsade. Och om tidigare designers löste problem som huvudsakligen var relaterade till ökad tillförlitlighet, måste de nu tänka på att skapa i grunden nya kretsar som antingen kommer att förändra den traditionella "arkitekturen" för el eller tillåta den att anpassa sig till takten i vetenskapliga och tekniska framsteg.
Däck ej för hjul:
Enkeltrådskretsen som fortfarande används innebär att de negativa terminalerna för alla elförbrukare är anslutna till "jord" - kroppen och andra metalldelar i bilen, som fungerar som den andra, negativa ledningen. Men när den totala längden på de faktiska ledningarna anslutna från konsumenterna till generatorns plus nådde en halv kilometer, och deras vikt närmade sig hundravikt, visade det sig att entrådskretsen inte var så bra som den tidigare hade verkat.
Därför dök multiplexkablar upp, och med den CAN-bussen (från Controller Area Network), som, samtidigt som den traditionellt bibehåller ett minus på marken, används istället för de "feta" selarna från den gamla kretsen på moderna bilmodeller, mättade med elektriska enheter och elektroniska enheter.
Den inbyggda elektroniken i en modern bil inkluderar Ett stort antal verkställande och kontrollanordningar. Dessa inkluderar alla typer av sensorer, kontroller, etc.
Ett pålitligt kommunikationsnätverk krävdes för att utbyta information mellan dem.
I mitten av 80-talet av förra seklet föreslog BOSCH ett nytt koncept för nätverksgränssnittet CAN (Controller Area Network).
CAN-bussen ger anslutning till alla enheter som samtidigt kan ta emot och sända digital information (duplexsystem). Själva bussen är en partvinnad kabel. Denna implementering av bussen gjorde det möjligt att minska påverkan av externa elektromagnetiska fält som uppstår under drift av motorn och andra fordonssystem. Denna buss ger en ganska hög dataöverföringshastighet.
Vanligtvis CAN-bussledningar orange färg, ibland kännetecknas de av olika färgade ränder (CAN-High - svart, CAN-Low - orange-brun).
Tack vare användningen av detta system från kompositionen elschema bil frigjordes ett visst antal ledare, vilket gav kommunikation, till exempel via KWP 2000-protokollet mellan motorstyrsystemets styrenhet och standardlarmsystemet, diagnosutrustning m.m.
Dataöverföringshastigheten via CAN-bussen kan nå upp till 1 Mbit/s, medan informationsöverföringshastigheten mellan styrenheter (motor - överföring, ABS - säkerhetssystem) är 500 kbit/s (snabb kanal), och informationsöverföringshastigheten av komfortsystemet "(styrenhet för krockkuddar, styrenheter i bildörrar etc.), informations- och kommandosystem är 100 kbit/s (långsam kanal).
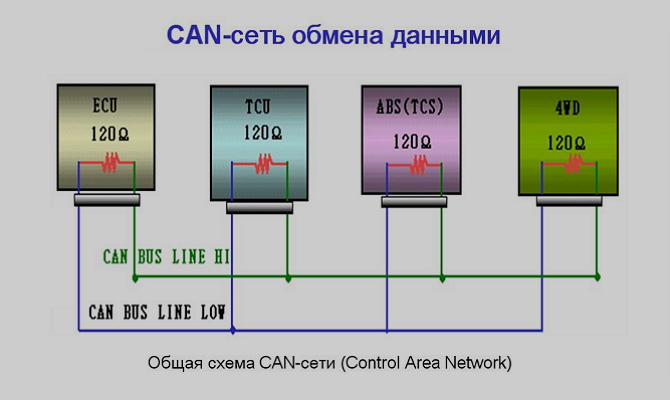
I fig. Figur 1 visar topologin och vågformen för en personbils CAN-buss.
Vid sändning av information till någon av styrenheterna förstärks signalerna av mottagaren-sändaren (sändaren) till önskad nivå.
Ris. 1. Topologi och vågformer för CAN-bussen
Varje enhet som är ansluten till CAN-bussen har en viss ingångsresistans, vilket resulterar i en total CAN-bussbelastning. Det totala belastningsmotståndet beror på antalet elektroniska styrenheter och ställdon som är anslutna till bussen. Till exempel är motståndet för styrenheter anslutna till kraftenhetens CAN-bussen i genomsnitt 68 ohm, och "Comfort" -systemet och informations- och kommandosystemet är från 2,0 till 3,5 kOhm.
Observera att när strömmen stängs av stängs belastningsmotstånden för modulerna som är anslutna till CAN-bussen av.
Ris. 2. Fragment av en CAN-buss med lastfördelning i ledningarna: CAN Hög CAN Låg
Fordonssystem och styrenheter har inte bara olika belastningsmotstånd, utan även dataöverföringshastigheter, som alla kan störa behandlingen av olika typer av signaler.
För att lösa detta tekniska problem används en omvandlare för att kommunicera mellan bussarna.
En sådan omvandlare brukar kallas en gateway, denna enhet i en bil är oftast inbyggd i konstruktionen av styrenheten, kombiinstrumentet och kan även göras som en separat enhet.
Gränssnittet används också för att mata in och mata ut diagnostisk information, vars begäran realiseras via "K"-ledningen ansluten till gränssnittet eller till en speciell CAN-buss diagnoskabel.
I I detta fall ett stort plus vid utförande av diagnostiskt arbete är närvaron av en enda enhetlig diagnostisk kontakt (OBD-kontakt).
Ris. 3. Gateway blockschema
Det bör noteras att på vissa bilmärken, till exempel på Volkswagen Golf V, är CAN-bussarna i Comfort-systemet och informations- och kommandosystemet inte sammankopplade med en gateway.
Tabellen visar elektroniska enheter och element relaterade till kraftenhetens CAN-bussar, komfortsystemet och informations- och styrsystemet. Elementen och blocken som anges i tabellen kan skilja sig i sammansättning beroende på bilens märke.
Diagnos av CAN-bussfel utförs med hjälp av specialiserad diagnosutrustning (CAN-busanalysatorer), ett oscilloskop (inklusive ett med inbyggd CHN-busanalysator) och en digital multimeter.
Arbetet med att kontrollera CAN-bussens funktion börjar som regel med att mäta motståndet mellan bussledningarna. Man måste komma ihåg att Comfort-systemets CAN-bussar och informations- och kommandosystemet, till skillnad från drivlinabussen, är konstant under spänning, så för att kontrollera dem bör du koppla bort en av batteripolerna.
De huvudsakliga felen i CAN-bussen är huvudsakligen förknippade med kortslutna/brutna linjer (eller belastningsmotstånd på dem), en minskning av nivån på signalerna på bussen och överträdelser i logiken för dess drift. I det senare fallet kan endast en CAN-busanalysator söka efter en defekt.
CAN-bussar av en modern bil
Inom parentes är det markerat vilka av styrenheterna som kommunicerar via databussen som finns i bilen VAZ 2170 (PRIORA).
Det enda är att våra bilar fortfarande styrs med en entrådskrets (LIN-buss), men du kan få en allmän uppfattning om vad en modern bil tillverkad av AVTOVAZ är från bordet...
Drivlina CAN-buss
Den elektroniska enheten maskinkontroll
Elektronisk transmissionsstyrenhet
Airbag kontrollenhet(Närvarande i Priora-bil)
ABS elektronisk styrenhet(Närvarande i Priora-bil)
Styrenhet för elektrisk servostyrning(Närvarande i Priora-bil)
Styrenhet för insprutningspump
Styrenhet för värmesystem(Närvarande i Priora-bil)
Standard larmstyrenhet(Närvarande i Priora-bil)
Centralt monteringsblock
Elektronisk tändningslås
Styrvinkelsensor
CAN-buss av Comfort-systemet
Instrumentkluster(Närvarande i Priora-bil)
Elektroniska dörrenheter(Närvarande i Priora-bil)
Elektronisk parkeringskontrollenhet
Komfortsystem styrenhet(Presenteras i en Priora-bil som en elpaketenhet)
Torkarstyrenhet
Däcktrycksövervakning
CAN-buss för informations- och kommandosystemet
Instrumentkluster(Närvarande i Priora-bil)
Ljudåtergivningssystem
Informationssystem
Navigationssystem
3 år
- justering av dataöverföringshastigheten genom att öka eller minska strömtillförseln;
- strömbegränsning för att förhindra skador på sensorn eller kortslutning av transmissionsledningar;
- termiskt skydd.
- Bensinstationer tar ut mycket pengar för enkel datordiagnostik
- För att ta reda på felet måste du gå till specialister
- Tjänsterna använder enkla slagnycklar, men du kan inte hitta en bra specialist
Original tyska autobuffrar Power GuardAutobuffertar - spara pengar på fjädringsreparationer, öka markfrigång+3 cm, snabb och enkel installation...
Officiell hemsida >>>
Elektroniksystem ombord i moderna personbilar och lastbilar ha en stor summa ytterligare enheter och ställdon. För att informationsutbytet mellan alla enheter ska bli så effektivt som möjligt måste bilen ha ett pålitligt kommunikationsnät. I början av 80-talet av 1900-talet föreslog Bosch och utvecklaren Intel ett nytt nätverksgränssnitt - Controller Area Network, som populärt kallas Can-bus.
1 Om funktionsprincipen för nätverksgränssnittet CAN-bus
Can-bussen i en bil är utformad för att ge anslutning till ev elektroniska apparater, som kan sända och ta emot viss information. Således passerar data om det tekniska tillståndet för system och styrsignaler över tvinnad kabel i digitalt format. Detta system gjorde det möjligt att minska Negativ påverkan externa elektromagnetiska fält och avsevärt öka hastigheten för dataöverföring via protokollet (reglerna enligt vilka styrenheter i olika system kan utbyta information).
Förutom, olika system att göra en bil med dina egna händer har blivit lättare. På grund av användningen av ett sådant system som en del av fordonets ombordnät har ett visst antal ledare frigjorts, som kan tillhandahålla kommunikation via olika protokoll, till exempel mellan motorstyrenhet och diagnosutrustning, larmsystem. Det är närvaron av Kan-bussen i bilen som gör att ägaren kan identifiera styrfel och fel med sina egna händer med hjälp av speciell diagnostisk utrustning.


Kan buss–Detta är ett speciellt nätverk genom vilket data överförs och utbyts mellan olika styrnoder. Varje nod består av en mikroprocessor (CPU) och en CAN-styrenhet, med hjälp av vilka det körbara protokollet implementeras och interaktion med fordonsnätverket säkerställs. Kan-bussen har minst två par ledningar - CAN_L och CAN_H, genom vilka signaler sänds via transceivrar - transceivrar som kan förstärka signalen från nätverksstyrenheter. Dessutom utför transceivrar sådana funktioner som:
Idag är två typer av transceivrar igenkända - hög hastighet och feltolerant. Den första typen är den vanligaste och överensstämmer med standarden (ISO 11898-2), den låter dig överföra data med hastigheter på upp till 1MB per sekund. Den andra typen av transceivrar låter dig skapa ett energibesparande nätverk med en överföringshastighet på upp till 120 Kb/sek, medan sådana sändare inte är känsliga för några skador på själva bussen.
2 Funktioner i nätverket
Det bör förstås att data överförs över CAN-nätverket i form av ramar. De viktigaste av dem är identifierarfältet (Identifire) och datasystemet (Data). Den vanligaste meddelandetypen på Kanbus är Data Frame. Den här typen dataöverföringen består av det så kallade arbitreringsfältet och bestämmer prioriterad dataöverföring i händelse av att flera systemnoder samtidigt överför data till CAN-bussen.
Var och en av styrenheterna som är anslutna till bussen har sin egen ingångsresistans, och den totala belastningen beräknas från summan av alla exekverbara block som är anslutna till bussen. I genomsnitt är ingångsresistansen för motorstyrsystem som är anslutna till CAN-bussen 68-70 ohm, och resistansen hos informations- och kommandosystemet kan vara upp till 3-4 ohm.
DET ÄR VIKTIGT ATT VETA!
Varje bilist borde ha en sådan universell enhet för att diagnostisera sin bil. Nuförtiden kan du inte leva utan en bilskanner!
Du kan läsa, återställa, analysera alla sensorer och själv konfigurera bilens omborddator med hjälp av en speciell skanner...
3 CAN-gränssnitt och systemdiagnostik
CAN-styrsystem har inte bara olika belastningsmotstånd, utan också olika meddelandeöverföringshastigheter. Detta faktum komplicerar behandlingen av liknande meddelanden inom nätverket ombord. För att förenkla diagnostik använder moderna bilar ett gateway-gränssnitt (motståndsomvandlare), som antingen är utformat som en separat styrenhet eller inbyggt i bilens motor-ECU.

En sådan omvandlare är också utformad för att mata in eller mata ut viss diagnostisk information via "K"-ledningen, som ansluts under diagnostik eller ändring av nätverksdriftparametrar antingen till diagnoskontakten eller direkt till omvandlaren.
Det är viktigt att notera att det för närvarande inte finns några specifika standarder för Can-nätverksanslutningar. Därför bestämmer varje protokoll sin egen typ av kontakter på CAN-bussen, beroende på belastningen och andra parametrar.
Sålunda, när du utför diagnostiskt arbete med dina egna händer, används en enhetlig OBD1- eller OBD2-typkontakt, som finns på de flesta moderna utländska bilar och inhemska bilar. Vissa bilmodeller, t.ex. Volkswagen Golf 5V, Audi S4, inte har en gateway. Dessutom är layouten av styrenheter och CAN-bussen individuell för varje bilmärke och modell. För att diagnostisera ett CAN-system med egna händer använder du specialutrustning, som består av ett oscilloskop, en CAN-analysator och en digital multimeter.
Felsökningsarbetet börjar med att nätspänningen tas bort (ta bort batteriets minuspol). Därefter bestäms förändringen i resistans mellan bussledningarna. De vanligaste typerna av CAN-bussfel i en bil är en kortslutning eller linjeavbrott, fel på belastningsmotstånd och en minskning av nivån på meddelandeöverföring mellan nätverkselement. I vissa fall är det inte möjligt att identifiera ett fel utan att använda en Can-analysator.
Tycker du fortfarande att det är svårt att diagnostisera en bil?
Om du läser dessa rader betyder det att du har ett intresse av att göra något själv i bilen och verkligen spara pengar, eftersom du redan vet att:
Och visst är du trött på att slänga pengar i sjön, och att köra runt på bensinstationen hela tiden är uteslutet, då behöver du en enkel BILSCANNER ELM327, som ansluts till vilken bil som helst och genom en vanlig smartphone kommer du alltid hitta problemet, stäng av KONTROLL och spara mycket pengar!!!
Vi testade den här skannern själva på olika maskiner och han visade utmärkta resultat, nu rekommenderar vi honom till ALLA! För att förhindra att du faller för en kinesisk förfalskning publicerar vi här en länk till Autoscanners officiella webbplats.