容量性フィードバックを備えた発電機の計算。 発電機の発振回路
自己発振回路に水晶共振器を組み込むことで、不安定要因にさらされた場合でも生成される周波数の安定性が高まります。 このため、最新の送信機は基準発振器として水晶自己発振器を使用しています。 現代の水晶発振器の増幅素子は、通常、小型であるためトランジスタです。 全体の寸法軽量、低消費電力、高い信頼性、即時の作業準備が可能です。
水晶自励発振器の回路は、動作周波数(w K、w 0、w K ... w 0)、回路内の回路内の位置、抵抗の性質(誘導性、最小性、能動性)に応じて分類されます。水晶振動子。 共振器抵抗の性質に基づいて、水晶自励発振回路は 2 つのグループに分類されます。 最初のグループには、共振器が 3 点回路の誘導性リアクタンスの 1 つとして機能する回路が含まれます。
2 つ目は、共振器がフィードバック回路に直列に接続された回路を含みます。 この場合、発電機は、共振器のアクティブ抵抗が最小になる周波数で最も容易に励起されます。これは、最も深いフィードバックに対応します。 直列共振周波数で動作する、発電機の発振回路に共振器を含めることが実践されている。
最初のグループの発電機(振動:発電機)を構築する場合、周波数範囲 w K ... w 0 における共振器抵抗の誘導性の性質が使用されます(図 5.4)。つまり、共振器が共振器と等価であるという事実です。高い品質係数を持つコイル。 したがって、3 点発振回路のインダクタンスの 1 つを共振器で置き換えることができます (図 4.8、a、b を参照)。
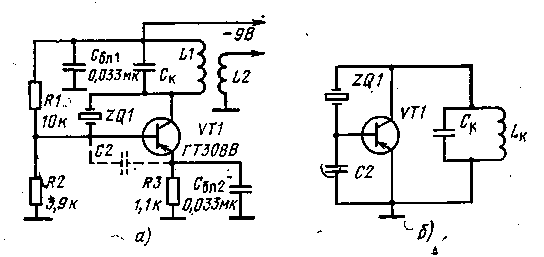
共振器は、容量性 3 点回路に従って組み立てられた自励発振器のトランジスタのベースとコレクタの間に接続できます。また、誘導性 3 点回路に従って組み立てられた自励発振器のベースとエミッタ、コレクタとエミッタの間にも接続できます。 -ポイント回路。 実用化私たちは、3点容量回路に基づいた発電機を発見しました。 このような発電機では、最大の周波数安定性が実現され、発電機回路は誘導性 3 点式と比較して調整が容易で信頼性が高くなります。 このような高周波発生器の概略図(電源回路を考慮せず)を図に示します。 5.5、a.
図の図に従って、自己発振器の動作の特徴的な 2 つの点に注目してください。 5.5、a. 第一に、共振器の誤動作または分路、および回路内の開回路は、生成された振動の中断につながりますが、水晶共振器なしでの発電機の動作が排除されるため、それ自体が有益です。 第 2 に、十分に大きな RF 電圧が共振器の両端に生成され、共振器が加熱され、生成される発振の安定性が低下します。 このため、水晶発振器は可能な限り低電力に作られています。
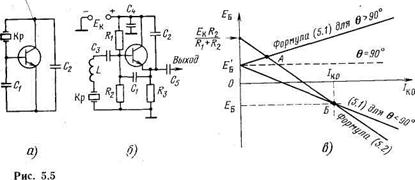
容量性三点回路に従って組み立てられたトランジスタ水晶自励発振器の考えられる実際的な回路の 1 つを図に示します。 5.5、b. 水晶発振器は、直列共振周波数 w K に近い周波数で励起されます。周波数を上げるために、共振器と直列に接続されたコイル L が提供されます。 トランジスタの動作点は抵抗 R1、R2、R3 によって決まります。 コンデンサ C1 および C2 は、共振器 Kp およびコイル L とともに、容量性 3 点回路を形成します (図 5.5、a)。 コンデンサ C3 と C5 は分離コンデンサです。
15 ~ 20 MHz を超える周波数で動作する場合、共振器の厚さは 0.1 ~ 0.2 mm になりますが、これは実装が難しく、可能な最大周波数が制限されます。 より高い周波数では、共振器は水晶板の機械振動の高調波で動作する可能性があります。 水晶板の厚さが変化すると、機械振動の高調波で振動する可能性があることが知られています。 この場合は可能です
何倍もの高い発生周波数が得られます。
簡単な発電機の回路を考えてみましょう。 自励するには、特定の周波数で位相バランスを確保する必要があります。 発電機は、誘導性または容量性の 3 点回路に従って作成できます。 このような回路は発振回路と呼ばれます。 現在、容量性 3 点回路は通常、安価なオプションとして使用されています。 図 1 は、バイポーラ トランジスタで作成された同様の回路を示しています。
図 1. バイポーラ トランジスタ上に作られた容量性 3 点
この回路では、増幅素子VT1は回路回路L1、C2、C3に含まれており、その共振周波数が回路の生成周波数を設定する。 フィードバックの深さは、この回路の静電容量と、特定の自励周波数におけるトランジスタのゲインの比によって設定されます。
図1に示す 回路図ジェネレーターは非常に複雑です。 これは、熱安定化要素 (R1、R2、および R4) の数と DC モードの設定 (抵抗 R3 およびコンデンサ C1) によって決まります。 このような発生器によって生成される発振は、前述の発生器の出力には正弦波電圧が含まれているため、デジタル超小型回路の同期には完全に適しているわけではありません。 デジタルチップが認識できる論理レベルに変換する必要があります。
発電機は、単一の論理インバーターに基づいて構築することもできます。 前の章で述べたように、誰もが後押しを受けます。 これにより、振幅のバランスが確保されます。 前の発電機回路とまったく同じ方法で位相バランスを確保します。 論理インバータに基づいて構築された容量性 3 点の回路を図 2 に示します。
図 2. 論理インバータ上に作成された容量性 3 点
論理要素にジェネレーターを実装する場合、ジェネレーターの開始時に論理要素がアクティブ モードであることを確認する必要があります。 通常の電源投入中、ロジック インバータは制限モードになります。 制限モードでは、発電機はハードモードで起動するため、このような回路で自励発振を発生させるには、インバータ入力に強力なパルスを印加する必要があります。
発振回路内で自発的に発振が発生する場合は、ロジック エレメントを増幅モードに切り替える必要があります。 これを行うには、インバーターをマイナス側で覆う必要があります。 フィードバック直流で。 図 2 に示す回路では、これはアクティブ インダクタンス抵抗 L1 を介してマイクロ回路の入力と出力を閉じることによって実現されます。
最初のインバーターの出力の信号も、回路のフィルター特性により正弦波になります。 2 番目のインバータは、出力電圧波形を方形波に変換し、生成された信号レベルをデジタル ロジック レベルにするために使用されます。 つまり、リミッティングアンプとして使用されます。 さらに、このインバータはデカップリング (バッファ) アンプの機能も実行します。 これは、負荷パラメータを変更しても生成される周波数に影響を与えないことを意味します。
LC 発電機の発振の安定性が低いことが知られています。 水晶発振器ははるかに安定しています。 1 つのインバータ上の回路は、水晶発振器の構築にも使用できます。 この場合、インダクタンスの代わりに、容量性の三点点で水晶振動子をオンにすればよい。 1 つの論理インバータ上の水晶発振器の回路を図 3 に示します。
図 3. ロジック インバータに基づく水晶発振器回路
周波数設定チェーンの静電容量は通常、10 ~ 30 pF の範囲で選択されます。 これらの静電容量の値は、水晶ホルダーの静電容量の値によって決まり、その範囲は 3 ~ 5 pF です。
静電容量の比率はフィードバックの深さを決定します。これは、温度範囲における発電機の起動の安定性を意味します。 高周波数では、通常、静電容量は等しく選択されます。 低周波発生器では、コンデンサ C2 の静電容量よりも小さい静電容量 C1 を選択することをお勧めします。 これにより、インバータ入力での電圧が増加し、消費電流の減少につながります。 発電機の周波数を調整する必要がある場合は、同調コンデンサを静電容量 C2 として使用できます。
水晶振動子は伝わらない DCしたがって、発電機を確実に自動始動するには、追加の抵抗を使用する必要があります。 図 3 の回路では、これらは抵抗 R1 と R2 です。 抵抗 R1 はインバータをアクティブ モードに切り替えます。 抵抗 R1/R2 の比により、発電機の能動素子のゲインが決まります。
非常に高い周波数の水晶共振器を使用する場合、発電機の自励を容易にするために抵抗器 R2 が存在しない場合があります。 低周波水晶共振器を使用する場合、抵抗器 R2 と静電容量 C2 は必要な位相シフトを提供し、水晶ホルダ静電容量の周波数での発電機の自己励起を防ぎます。 さらに、抵抗器 R2 は水晶振動子で消費される電力を制限するため、発電機内で小型の水晶振動子を使用できるようになります。
電力消費を節約するために発電機を停止する必要があることがよくあります。 この場合、論理インバータの代わりに「2AND-NOT」回路を使用できます。
図 4. 論理積素子を使用して作成した水晶発振器の回路
同様の回路を図 4 に示します。この回路は、ほとんどの最新のマイクロ回路内でマスター クロック発振器として使用されます。
文学:
「発電機の発振回路」という記事と一緒に次のように書かれています。
http://site/digital/gen.php
米。 20. 船舶ラジコン模型の操舵装置の設計
自動車モデルに実装されている多くの設計ソリューションは、ラジコン船舶モデルにもうまく適用できます。 船舶モデリングには、いくつかのクラスのラジコン モデルがあります。 鼻針で浮遊モデルのボールを打ち、海戦を主導するモデル。 セーリングヨット。 エンジンによる高速船舶モデルの制御 内燃機関レーシングカーを運転するのと同じです。 船舶モデルに 2 つの舵が取り付けられている場合、それらの軸はステアリング台形によって互いに接続されます。 モデルでは、アクティブラダー、さまざまなアタッチメント、スラスターを取り付けることができます。 アクティブ舵のモデルバージョンの例は、アルマトイの船舶モデラー I. Efremov によって設計されたスクリュー舵 (図 20) です。 この舵の助けを借りて、船舶模型はその場で (動かずに) 360° 回転することができます。 船の操縦性は前進でも後進でも同じです。 ネジステアリングホイールのデザインを考えてみましょう。 固定舵板12は、脚2とネジ3を用いて船舶の船体1に取り付けられている。 リング14が再度固定され、その中に3枚羽根のプロペラ13が組み込まれている。シャフト5のベアリング4は、リングの2つのカバーに取り付けられている。右側のカバーの側面には、ブラケット6があり、これは、ブラケットとして機能する。ベベルギア対 7、8 のサポート。これらはシャフト 5 と 10 にネジで固定されています。この目的のために、シャフトにスキー板が取り付けられています。 操舵装置のプロペラシャフト10は、船尾管9および船体に取り付けられたブラケット11を介して船体に挿入される。 ラダープロペラシャフトは 15 ~ 30 W の電力の電気モーターで駆動することをお勧めします。 テールローターの直径とブレードの取り付け角度は実験的に選択されます。 排水量 12 kg の貨客船のモデルの場合、プロペラの直径は 30 mm、その 4 枚のブレードは軸に対して 45° の角度で取り付けられている必要があります。 フィギュアコースに出場するモデルにはこのようなネジが必要です。 高速モデルやその他のモデルでは、回転羽根を備え、ステアリングコマンドが停止されたときの自動調心システムを備えた舵の方がより効果的に機能します。 さまざまな船舶のラジコン モデルは、デモンストレーションや実験の目的で構築されることがよくあります。 この場合、あらゆる種類の制御機構がモデルにインストールされます。 それらをオンまたはオフにするには、セレクター ブロックを使用できます。その図を図に示します。 3. 模型飛行機の設計と製作に役立ついくつかのヒントも提供します。 航空機モデラーはこちら 初期航空機モデルの無線制御をマスターするには、シリアル機器「Supranar-83」とシリンダー容積7または10 cm 8 の「Rainbow」エンジンに焦点を当てる必要があります。 それにもかかわらず、他のエンジンは模型飛行機に取り付けるのに非常に適しています。 尖った胴体を持つ YA-3、YA-6、Trainer-226、ANT-25 航空機のレプリカ モデルには、シリンダー容量 7 cm 3 のレインボー エンジンを取り付けることが可能です。 シリンダー容量 10 cm3 のレインボー エンジンは、最大 5 kg の重量のモデルを空中に持ち上げることができます。 グローエンジンを使用する場合は搭載電子機器を密閉し、模型を覆う必要があります 薄い層エポキシ樹脂ED-6。 これは、未燃焼のメタノールを含む排気ガスが無線機の塗装や絶縁体、モデルの皮膚のエナメルコーティングを溶かすためです。 航空機レプリカモデルの無線機器の質量は、その重量の 40 ~ 45% を超えてはなりません。 総質量。 風速 5 ~ 7 m/s で飛行中のモデルの座面にかかる荷重は 40 ~ 45 g/dm 2 以下である必要があります。 モデルのアライメントは、すべての機器を配置した後のモデルの重心が翼の圧力中心と一致するように計算されます。 機体フレームを設計および製造する際には、着陸装置、受信機、ステアリング装置、電源、燃料タンクなどの取り付け箇所を慎重に検討する必要があります。米。 21. ラジコン航空機モデルに機器を配置するためのオプション:
1 - 電源;2 - 受信機;3 - ステアリングギア(D - エンジンシャフトの回転数、RV - エレベーター、RP - ハンドル);4 - トラクション; 5 - ステアリングロッカー。6 - ステアリングレバー。 7 - エレベーター。8 - エルロン制御ステアリングマシン。 9 - エルロン。10 - 接続ケーブル; 11 - スライド式スイッチロッド。12 - スイングアーム。13 - 前輪スタンド。14 - ボーデンケーブル最もシンプルなデザインの航空機モデルは YA-3、YA-6、YAK-12 です。 これらは高い翼を備えているため、飛行中のモデルの安定性が向上します。 これらの航空機の胴体には大きな平らな面があります。 複雑な曲線やトランジションがないため、コピーが簡単になります。 ANT-25、YAK-18、Trainer-226 などの翼の低いモデルのコピーモデルは、通常、豊富な経験を持つモデラーによって作成されます。 飛行中のエンジンシャフトの回転速度は、スロットルバルブで吸気管と排気管の開口部を同時に閉じることで制御されます。 スロットルバルブセクター、プレート、スプールタイプにすることができます。 シリアルマイクロモーターにはダンパーが装備されておらず、モデラー自身が取り付けます。 - 図中。 図 21 は、模型飛行機に無線制御装置を配置するためのオプションを示しています。 図面は本質的に概略的なものであり、構造の性質の一般的なアイデアのみを提供します。 初めて製造される航空機のラジコンモデルは、飛行中の耐久性と安定性が向上し、乱暴な着陸や操縦技術のミスに耐えられるように作られた訓練用モデルである必要があります。 このような訓練用航空機モデルは、マルチチーム モデルの速度と曲技飛行能力に、操縦の容易さと飛行中の安定性を組み合わせたもので、多くの航空機モデリングの第一人者によって設計されています。 I. ニキフォロフ (モスクワ地域スポーツ アイオデリズム技術クラブ) が設計したトレーニング モデルの技術データは次のとおりです。翼幅 1880 mm。 モデルの長さ 1350 mm。 耐荷重面の面積 69 dm 2 ; 翼面積 55.1 dm 2; 飛行重量2950g。 エンジンを除いた機体重量 1150 g。 パーセントでセンタリングする さー - 30%; コーナー Uウィング6°。 ネジモデルの直径とピッチの比は 260/140。 エンジンシリンダー容積 5 cm3; 制御コマンド数 8. 無線機の信頼性を高めるため、受信機と電源部を発泡ゴムまたはスポンジゴムで包み模型に組み込んでいます。 すべての機械ロッド、コンポーネント、および締結部品は、ガタつきなく高精度で製造されなければなりません。 モデルの操縦を成功させるには、確立されたプログラムに従ってモデラーを定期的にトレーニングする必要があります。 飛行の個々の要素を習得するときは、モデルを制御する器用さを開発する必要があります。その後、モデルの飛行能力を特定してから、曲技飛行の練習に進みます。3. クォーツジェネレーター- 無線制御装置の最も重要なリンク
自動接続は、模型のラジコン用の最新機器が満たさなければならない条件です。 非ステッチ無線通信は、送信機のマスター発振器と受信機の局部発振器にある自己発振器の水晶周波数安定化によって確保されます。 アマチュア無線家は、さまざまな機器用に設計されたランダム水晶共振器 (クォーツ) を使用することがよくありますが、共振器のパラメータを示す技術パスポートは必要ありません。 この点に関して、水晶周波数安定化を備えた自励発振器の完全な計算を常に行うことが可能であるとは限りませんが、アマチュア無線家は機器をセットアップする際に試行錯誤して望ましい結果を達成します。 使用されているバージョンの自動発振器の動作原理を理解していれば、マスター発振器またはローカル発振器を必要な周波数に簡単かつ正確に設定することができます。 まず通常の自己発振器について説明し、次に水晶共振器を備えた自己発振器の最も許容可能なオプションについて説明します。 まずは、自己発電機とは何ですか?という質問に答えることから始めましょう。 自己発電機は、電源のエネルギーを高周波振動のエネルギーに変換する装置であり、外部からの一定の影響を受けることなく動作します。 自励発振器の励振のきっかけは、電源投入時の短期間の過渡現象とトランジスタ回路の電流変動です。 発振回路内で生じる自励条件が満たされると、弱い発振が増幅されます。これは、発振回路で失われるよりも多くのエネルギーが、後続の発振周期で発振回路に入力されることを意味します。 自己発振器は非線形システムであるため、振幅はサイクルごとに増加しますが、無限に増加するわけではありません。 数サイクル後、振動の振幅の増加は減速し、ある時点で振動は定常状態になります。つまり、振幅のバランスが取れています。 振幅平衡の条件 S 1 R y =l、ここで S 1 は第一高調波におけるコレクタ電流の傾きであり、発電機の不足電圧モードの場合、次の式で決定されます。 S 1
-S Y1 (F),
ここで、Y 1 (Ф) は、コサイン電流パルスの第 1 高調波への展開係数です (その値は表から求められます)。 Rу は自己発振器の制御抵抗であり、等価回路抵抗 R とフィードバック係数で表されます。 に比率 R で =
KR n .
回生係数の概念が発電機の理論に導入されました G=
S.R. U .
係数 7i(9) は、回生係数を通じて次の式で表されます: Y 1 (Ф) = l/G。 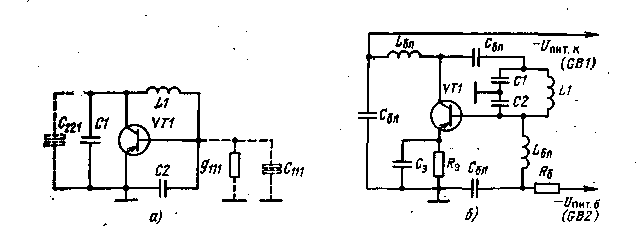
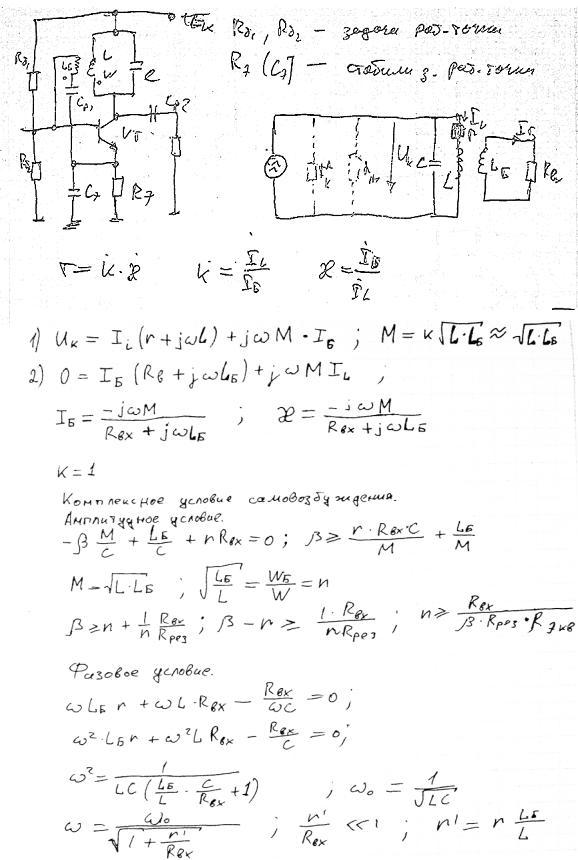
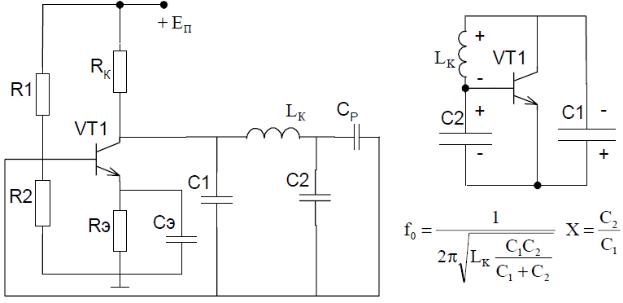
米。 22. 容量性「3点」回路による自動発電機:
ある - 等価回路。 b - ベース回路用に外部電源を使用して回路を構築するためのオプション自励発振器を計算する場合、通常、C と K の値によって指定されます。自励発振条件: S n R y =l、S n は静止点でのコレクタ電流の静特性の傾きです。 。 トランジスタを備えた自励発振器は、正帰還を備えた増幅器と考えることができます。電力利得と帰還係数の積の係数は 1 に等しく、必要な周波数の位相角はゼロに等しくなければなりません。 標準的な発振回路は数多くあります。 これらのうち、最も一般的なのは 3 つです。容量性「3 点」(図 22)、変圧器フィードバックを備えた誘導性「3 点」です。 一般化された 3 点回路による自己発振器の位相バランスの条件は、次の式で表されます。 × 9 ъ+Х ああ = - HBK、どこ × E b、X zk 、Hbk- トランジスタの対応する端子間のリアクタンス。 以下に説明するいくつかの理由により、容量性の「3 点」が優先されます。 容量性「3 点」の自己発振器の理論には次の式があります。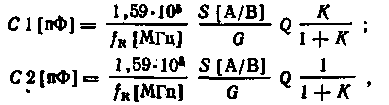 ここで、f K は生成周波数です。 これらの式から、コンデンサ C1 と C1 の静電容量は明らかです。 C2同時に、自励発振器の周波数の不安定性に対するトランジスタの入出力回路(Cm、gin、Caai)の影響がより顕著になります。 静電容量 C1 と C2 には、コンデンサ自体に加えて、実装静電容量、トランジスタの出力および入力静電容量、接続された段の導入静電容量が含まれることに留意してください。 通常は G = 2 ~ 4 を選択することを推奨します。トランジスタの入出力回路のパラメータの変化による不安定成分もフィードバック係数 K に依存します。 最適値 K=
コウル,
これにより、最大の周波数安定性が保証されます。 フィードバック係数 K は実験的に選択できます。 発振回路の品質係数 Q が増加すると、前述の不安定成分の影響が減少します。 すでに述べたように、発電機の周波数の安定性は、回路の品質係数とそのパラメータの一定性に依存します。 発電機フィードバック回路の位相シフトは変化に応じて変化します 内部抵抗たとえば、温度や電源電圧の変化によるトランジスタの入力容量。
ここで、f K は生成周波数です。 これらの式から、コンデンサ C1 と C1 の静電容量は明らかです。 C2同時に、自励発振器の周波数の不安定性に対するトランジスタの入出力回路(Cm、gin、Caai)の影響がより顕著になります。 静電容量 C1 と C2 には、コンデンサ自体に加えて、実装静電容量、トランジスタの出力および入力静電容量、接続された段の導入静電容量が含まれることに留意してください。 通常は G = 2 ~ 4 を選択することを推奨します。トランジスタの入出力回路のパラメータの変化による不安定成分もフィードバック係数 K に依存します。 最適値 K=
コウル,
これにより、最大の周波数安定性が保証されます。 フィードバック係数 K は実験的に選択できます。 発振回路の品質係数 Q が増加すると、前述の不安定成分の影響が減少します。 すでに述べたように、発電機の周波数の安定性は、回路の品質係数とそのパラメータの一定性に依存します。 発電機フィードバック回路の位相シフトは変化に応じて変化します 内部抵抗たとえば、温度や電源電圧の変化によるトランジスタの入力容量。 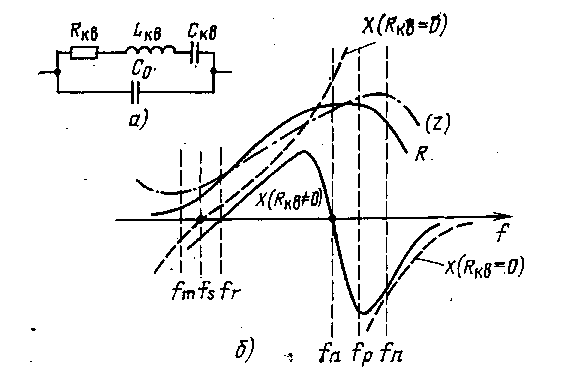 リc。 23. 水晶振動子の等価回路 (a) および水晶振動子の複素抵抗の能動抵抗、無効抵抗、モジュールの周波数依存性 (b) 安定性の高い自励発振器では、回路またはその素子として電気機械共振子が使用されます。 、高い品質係数と実践に十分な温度安定性を備えています。 水晶振動子が最も広く使用されています。 -水晶振動子の端に交流電圧を加えると振動します。 機械振動の共振周波数はプレートの寸法によって決まります。 共振器はエネルギーのごく一部を散逸するため、水晶共振子の等価品質係数 Q は 10,000 ~ 1,000,000 になります。水晶共振子の等価回路を図に示します。 23. この回路は、損失抵抗 R kV を無視すると、2 つの共振周波数 (直列共振) を持ちます。 f t
並列共振 f p は次の式で決定されます。ここで、L KB、C sq、Co は等価回路の要素です。 損失を考慮していない水晶リアクタンス対周波数の曲線を図に示します。 破線で23.6。 最初のケース (f f) のリアクタンス ×
ゼロに等しい、2 番目 (f p) - 無限大。 損失を考慮すると、回路には複素抵抗 Z=R+jX が生じます。 同じ図で。 反応性および活性抵抗と複素抵抗係数の依存性を示します。 Z| =\/
R 2
+
× 2:
周波数から。 周波数差 t p - f 8 = Df は、共振区間の幅と呼ばれます。
リc。 23. 水晶振動子の等価回路 (a) および水晶振動子の複素抵抗の能動抵抗、無効抵抗、モジュールの周波数依存性 (b) 安定性の高い自励発振器では、回路またはその素子として電気機械共振子が使用されます。 、高い品質係数と実践に十分な温度安定性を備えています。 水晶振動子が最も広く使用されています。 -水晶振動子の端に交流電圧を加えると振動します。 機械振動の共振周波数はプレートの寸法によって決まります。 共振器はエネルギーのごく一部を散逸するため、水晶共振子の等価品質係数 Q は 10,000 ~ 1,000,000 になります。水晶共振子の等価回路を図に示します。 23. この回路は、損失抵抗 R kV を無視すると、2 つの共振周波数 (直列共振) を持ちます。 f t
並列共振 f p は次の式で決定されます。ここで、L KB、C sq、Co は等価回路の要素です。 損失を考慮していない水晶リアクタンス対周波数の曲線を図に示します。 破線で23.6。 最初のケース (f f) のリアクタンス ×
ゼロに等しい、2 番目 (f p) - 無限大。 損失を考慮すると、回路には複素抵抗 Z=R+jX が生じます。 同じ図で。 反応性および活性抵抗と複素抵抗係数の依存性を示します。 Z| =\/
R 2
+
× 2:
周波数から。 周波数差 t p - f 8 = Df は、共振区間の幅と呼ばれます。 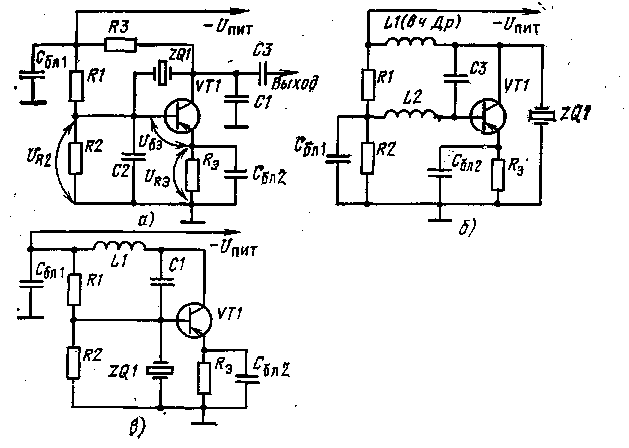
米。 24. 基本周波数で水晶励起を行う並列共振水晶発振器回路のオプション:
あ - 容量性「3点」。b、c - 帰納的な「3点」の等価インダクタンスは n番目の機械式 Hvarts の高調波は基本周波数でのインダクタンスと比較して実質的に変化せず、等価静電容量は基本周波数でより小さくなります。 n 2 倍、共振間隔は n 一度。 共振器の品質係数は、パスポートに動作していることが示されている高調波で最高となり、したがって本体に示されている周波数でも最高になることに注意してください。 もう一つ 一般的な立場。 他の多くの要素と同様に、石英には許容散逸力があり、それを超えると無効になる可能性があります。 通常、発電機に供給される電力の 10% 未満が石英で消費されます。 さまざまな種類共振器は2~4mWに対応します。ここで直接水晶発振器について説明します。 それらは、並列共振発生器 (発振) と直列共振発生器 (フィルター) に分けられます。 それらの水晶は、基本周波数と奇数の機械的高調波の両方で動作できます。 発振器の発振器では、水晶は共振間隔内の周波数で励起されますが、並列共振に近い場合、そのリアクタンスは誘導性になります。 直列共振発生器では、励起は直列共振に近い周波数で発生し、水晶のリアクタンスはゼロで、そのアクティブ抵抗は非常に小さくなります。
図では、 図 24 は、水晶が基本周波数で動作する並列共振発生器の回路オプションを示しています。 アマチュア無線の設計では、最も一般的な発電機は容量性の「3 点」回路に基づいており、トランジスタのコレクタとベースの間に水晶が接続されています (図 24、o)。 設計と構成がシンプルで、優れた周波数安定性を提供します。 図では、 図25は、14.1MHzの周波数における容量性「3点」を有する発振水晶発振器の実際の図を示し、周波数2倍器との接続を示す。 図では、 図 26 に、機械的高調波を使用して水晶を励起する回路を示します。 これを行うには、容量性「3 点」のコンデンサの 1 つを、生成周波数より低い周波数で共振するように調整された並列回路に置き換えます。 その結果、回路は目的の高調波の周波数では容量性導電性を持ち、より低い高調波と基本周波数では誘導性導電性を持ち、より低い高調波と基本周波数での発生の可能性が排除されます。 これを図に示します。 図27は、直列回路と並列回路のリアクタンスを示す図である。 図では、 27 次の指定が使用されます。 wL - 直列回路の誘導部分の抵抗。 1/wС - 直列回路の誘導部分の抵抗。 Z は直列回路の合計抵抗です。 1/wL - 並列回路の誘導性分岐の導電率。 o»C - 並列回路の容量性分岐の導電率。 U は並列回路の合計導電率です。 
米。 25. マスターオシレータと周波数逓倍器の回路
 米。 26. 高調波で水晶振動子を励起するための自己発振器 (容量性「3 点」) の回路(A)
とその等価回路(b)
20 MHzを超える周波数で動作する発振器では、水晶は通常、第3高調波または第5高調波で励振されますが、それ以上の高調波では静電容量と実装容量の悪影響がより強いため、励起されません。 発電機を計算するには、その回路を図に示します。 図 25 に、コンデンサ C1 と C2 の静電容量 (ピコファラッド単位)、フィードバック係数の係数 | の簡単な式があります。 K|コレクタの高周波電圧 (ボルト単位):
米。 26. 高調波で水晶振動子を励起するための自己発振器 (容量性「3 点」) の回路(A)
とその等価回路(b)
20 MHzを超える周波数で動作する発振器では、水晶は通常、第3高調波または第5高調波で励振されますが、それ以上の高調波では静電容量と実装容量の悪影響がより強いため、励起されません。 発電機を計算するには、その回路を図に示します。 図 25 に、コンデンサ C1 と C2 の静電容量 (ピコファラッド単位)、フィードバック係数の係数 | の簡単な式があります。 K|コレクタの高周波電圧 (ボルト単位): 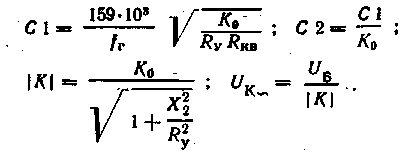 ここ Rで自動生成装置の過小ストレス モードに基づいて選択されます。 Xg- コンデンサC2の静電容量; 株式会社- コンデンサの静電容量の比を決定する係数 C2/C1 = 1/Ko; f g - 生成周波数、MHz; Rkv - 石英の等価アクティブ抵抗。 P403、GT308、または同様のシリーズのトランジスタを使用する発電機では、この値は 株式会社 1 - 1.5 に等しく計算され、P411、GT311 シリーズのトランジスタでは - 0.7 - 0.8 に等しくなります。
ここ Rで自動生成装置の過小ストレス モードに基づいて選択されます。 Xg- コンデンサC2の静電容量; 株式会社- コンデンサの静電容量の比を決定する係数 C2/C1 = 1/Ko; f g - 生成周波数、MHz; Rkv - 石英の等価アクティブ抵抗。 P403、GT308、または同様のシリーズのトランジスタを使用する発電機では、この値は 株式会社 1 - 1.5 に等しく計算され、P411、GT311 シリーズのトランジスタでは - 0.7 - 0.8 に等しくなります。 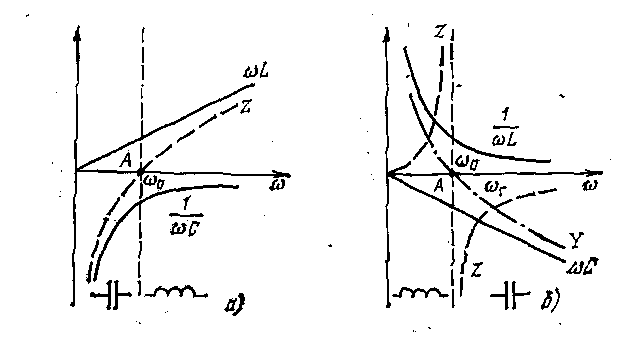
図 27 リアクタンス図:
a - 順序回路。 b - 並列回路トランジスタのコレクタ回路とベース回路が共通電源 Upit から電力供給される場合 (図 24、a を参照)、次の比率が有効です。 ベース回路の等価抵抗
ベース回路の等価抵抗  係数の値を決定するには あ組み立てた発電機では、水晶を取り付ける前に、可変抵抗器を備えた時分割器を使用してコレクタ電流を 2 ~ 3 mA 以内に設定する必要があります。 この後、電圧を測定する必要があります ウルズ,
次に R1 と R2 を計算します。 抵抗器 R8 の抵抗値によって、発電機の温度安定性が決まります。 この抵抗器の選択には推奨事項があります。 GT308 シリーズのトランジスタおよびそれに近いパラメータの場合、R 9 は 300 オームに等しく設定されます。また、GT311 シリーズおよび類似のトランジスタの場合は、R 9 が 300 オームに等しくなります。 -G- 390オーム。 負荷抵抗 R3 の抵抗値は次の式で決定されます。ここで、C1 は外部コンデンサ C の静電容量、 は設置静電容量 (3 ~ 5 pF) です。 ch と Cout - 生成周波数におけるトランジスタの入出力容量 類推による C2"=C2+C M +C VX .
コンデンサの静電容量 - SZ は、C3 = (0.01 - 0.1) C1 の関係から決定されます。 ブロッキング コンデンサの容量 (ピコファラッド単位) は、次の式を使用して計算されます。
係数の値を決定するには あ組み立てた発電機では、水晶を取り付ける前に、可変抵抗器を備えた時分割器を使用してコレクタ電流を 2 ~ 3 mA 以内に設定する必要があります。 この後、電圧を測定する必要があります ウルズ,
次に R1 と R2 を計算します。 抵抗器 R8 の抵抗値によって、発電機の温度安定性が決まります。 この抵抗器の選択には推奨事項があります。 GT308 シリーズのトランジスタおよびそれに近いパラメータの場合、R 9 は 300 オームに等しく設定されます。また、GT311 シリーズおよび類似のトランジスタの場合は、R 9 が 300 オームに等しくなります。 -G- 390オーム。 負荷抵抗 R3 の抵抗値は次の式で決定されます。ここで、C1 は外部コンデンサ C の静電容量、 は設置静電容量 (3 ~ 5 pF) です。 ch と Cout - 生成周波数におけるトランジスタの入出力容量 類推による C2"=C2+C M +C VX .
コンデンサの静電容量 - SZ は、C3 = (0.01 - 0.1) C1 の関係から決定されます。 ブロッキング コンデンサの容量 (ピコファラッド単位) は、次の式を使用して計算されます。  どこ ケ- オーム単位の抵抗。 f g - メガヘルツ単位の周波数。 容量性「スリーファイン」と奇数の機械的高調波で動作するクォーツを備えたバージョンの発電機に移りましょう (図 26 を参照)。 コンデンサーの役割がある C1発振回路は並列回路 C K L K によって機能します (図 26.6 を参照)。 すでに述べたように、生成周波数では、この回路は容量性リアクタンス、つまりその共振周波数を持たなければなりません。 フォ
生成周波数よりも低くする必要があります。 回路パラメータは次のように選択する必要があります。 自分の周波数は fo = .(0.7 - 0.8)f g に等しかったです。図を見てみましょう。 27.6。 周波数 Ш Р では、容量性導電率 V = w g C eq = w g C "k -1/ が得られます。 w G L に、ここで C は L K -
それぞれ、回路の静電容量とインダクタンスです。 通常はインダクタンス L K
建設的な考慮事項によるものです。 静電容量 C EC in は、上で概説した方法によって決定されるコンデンサ C1 の静電容量と等しくなるように選択されます。 この後、次のようになります。
どこ ケ- オーム単位の抵抗。 f g - メガヘルツ単位の周波数。 容量性「スリーファイン」と奇数の機械的高調波で動作するクォーツを備えたバージョンの発電機に移りましょう (図 26 を参照)。 コンデンサーの役割がある C1発振回路は並列回路 C K L K によって機能します (図 26.6 を参照)。 すでに述べたように、生成周波数では、この回路は容量性リアクタンス、つまりその共振周波数を持たなければなりません。 フォ
生成周波数よりも低くする必要があります。 回路パラメータは次のように選択する必要があります。 自分の周波数は fo = .(0.7 - 0.8)f g に等しかったです。図を見てみましょう。 27.6。 周波数 Ш Р では、容量性導電率 V = w g C eq = w g C "k -1/ が得られます。 w G L に、ここで C は L K -
それぞれ、回路の静電容量とインダクタンスです。 通常はインダクタンス L K
建設的な考慮事項によるものです。 静電容量 C EC in は、上で概説した方法によって決定されるコンデンサ C1 の静電容量と等しくなるように選択されます。 この後、次のようになります。  一般化された回路容量 と" に
(pF単位)はインダクタンスを指定することで決定できます。 L K
(μH 単位)、次の式に従います。
一般化された回路容量 と" に
(pF単位)はインダクタンスを指定することで決定できます。 L K
(μH 単位)、次の式に従います。  コンデンサ C の比容量は次のとおりです。 と に =C" に - と 外 -
L M - と 貢献 .
C HV os を決定するときは、バッファ段の接続の性質から自己発振器に進みます。 外部負荷の接続には、誘導、単巻変圧器、外部容量結合の 3 つのオプションが可能です (図 28)。
コンデンサ C の比容量は次のとおりです。 と に =C" に - と 外 -
L M - と 貢献 .
C HV os を決定するときは、バッファ段の接続の性質から自己発振器に進みます。 外部負荷の接続には、誘導、単巻変圧器、外部容量結合の 3 つのオプションが可能です (図 28)。 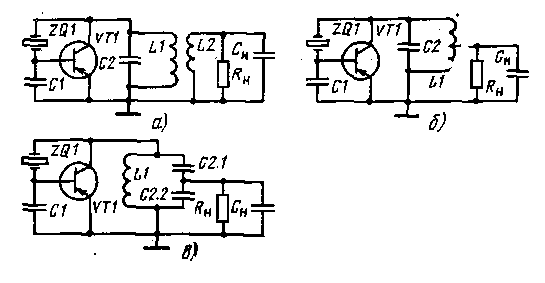
米。 28. 機械的高調波で動作する水晶共振器を備えた 3 点容量性発電機の等価回路:
a - 負荷との接続は誘導性です。b - 単巻変圧器と負荷との接続。V - 負荷との外部容量結合負荷との接続は最適なマッチング条件から選択されます。 ここで、Ktr は変換係数です。 L2 - 負荷との結合コイルのインダクタンス。 L1
- 回路コイルのインダクタンス。たとえば、20 ~ 30 MHz の範囲の周波数では、0.6 μH に等しく選択されます。 に セント
- コイル間の結合係数。次の式で決定されます。
ここで、Ktr は変換係数です。 L2 - 負荷との結合コイルのインダクタンス。 L1
- 回路コイルのインダクタンス。たとえば、20 ~ 30 MHz の範囲の周波数では、0.6 μH に等しく選択されます。 に セント
- コイル間の結合係数。次の式で決定されます。  どこ
どこ 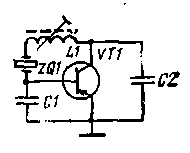 米。 29. 誘導分岐に水晶を使用した水晶発振器の等価回路 容量性«
スリーポイント」
米。 29. 誘導分岐に水晶を使用した水晶発振器の等価回路 容量性«
スリーポイント」 回路内に水晶を使用し、5 ~ 50 MHz の範囲の周波数で動作するように設計された発電機を考えてみましょう。 図では、 図 29 は、容量性「3 点」を備え、回路の誘導分岐に水晶を備えた発電機の図を示しています。 発生器回路の静電容量は、コンデンサ C1 と C2 の直列接続された静電容量で構成されます。
生成は水晶の直列共振の周波数に近い周波数で発生します。この場合、全抵抗は最小となり、本質的にアクティブになります。 コイル L1 (インダクタンスの 2 倍以上のオーバーラップを持つ) を使用すると、発生周波数を公称値から ±(20 - 50)10 -6 以内で調整することが可能です。 カトゥシェフ インダクタンス Ll (μH) は次の式で求められます。  ここで、C1 と C2 はコンデンサの静電容量 (pF) です。 f g - 周波数 (MHz)。
ここで、C1 と C2 はコンデンサの静電容量 (pF) です。 f g - 周波数 (MHz)。 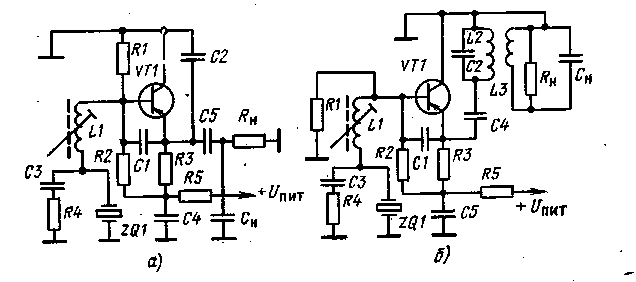
米。 30. 直列共振付近で動作する水晶共振器を備えた発振回路:
4. ディスクリート制御装置
モデルの動きは 1 回限りの (個別の) コマンドで制御できます。 オペレーターによって送信されるこれらのコマンドの性質は、モデル上のアクチュエーターのタイプによって異なります。 コマンドを使用してアクチュエータをオンまたはオフにする場合、コマンドの有効期間は短くなります。 舵を制御する場合、コマンドの継続時間によって必要なステアリング角度が決まります。 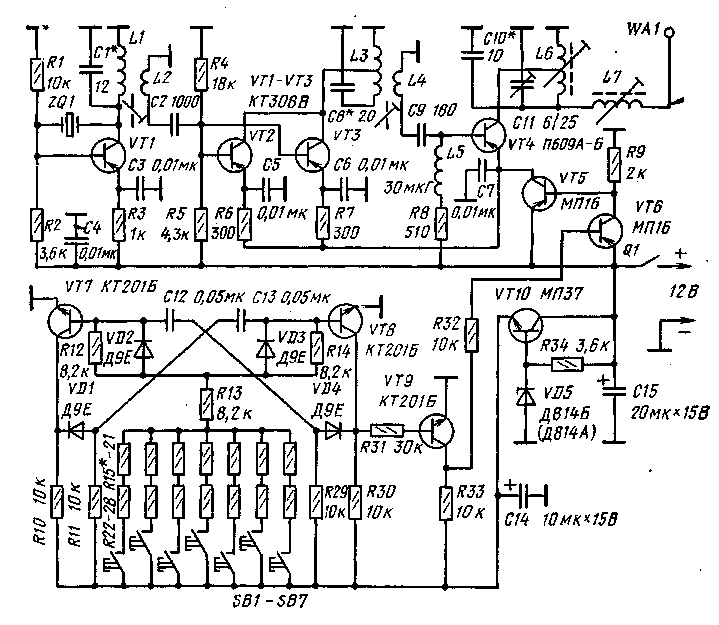
11) 並列 RC 回路のパラメータ。
1. 複雑な抵抗 交流: Z(w)Uk
2. 0 | ||||||||||||||||||||||||||
品質係数 Q | ||||||||||||||||||||||||||
共振インピーダンス R | L) 2 | |||||||||||||||||||||||||
LC 回路は、高い出力インピーダンス I k を持つ回路ポイント間に接続する必要があります。
(r j l) 1
jC;
r j l 1 j C
12) トランス LC 発振器。
フィードバック信号はフィードバックコイルを分離することで得られます。
13) 誘導三点。
ハートレー発電機 (誘導三点式) は、正帰還がタップを通じて取られる電子 LC 発電機です。
並列 LC 回路のインダクタの一部。
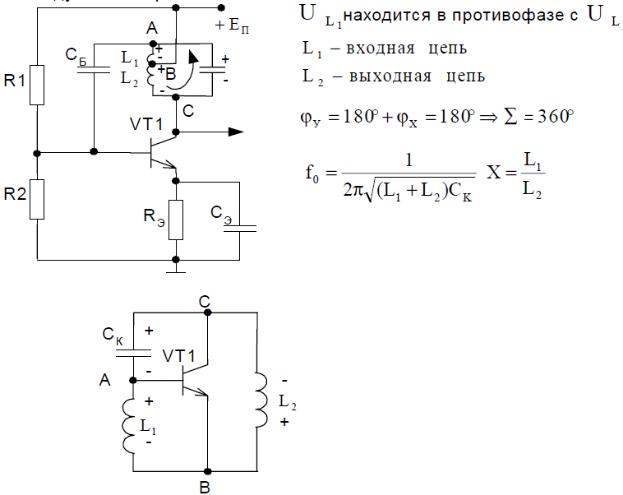
14) 容量性 3 点。
コルピッツ発電機 (3 点容量性) は、発明者エドウィン コルピッツにちなんで名付けられ、多くの回路のうちの 1 つです。 電子発電機インダクタンス (L) とキャパシタンス (C) の組み合わせを使用して周波数を決定し、LC 発振器とも呼ばれます。 このタイプの発電機の重要な特徴の 1 つは、そのシンプルさです (タップなしで必要なインダクターは 1 つだけです)。
フィードバック電圧は容量性分圧器から除去されます。
15) 水晶発振器。
水晶発振器。 水晶発振器の名前は、発振回路の代わりに発電機に使用される水晶振動子に由来しています。 水晶発振回路の品質係数とその安定性は非常に高いため、LC または RC タイプの発電機回路でそのような値を達成することはまったく不可能です。 たとえば、LC 発振器の周波数安定性は約 0.1%、LC 発振器は約 0.01%、水晶発振器の周波数不安定性は 10-4 ~ 10-5% です。
水晶の等価回路。
Ris - 損失抵抗、Sys - 直列容量、Spr - 並列容量。 L – 等価インダクタンス。 このような回路には 2 つの共振周波数があります。電圧共振 LC は 1/2、電流共振 LC pr 1/2 です。
等 これらの共振周波数は互いに非常に近く、その差はわずか約 1% です。 その結果、水晶回路の周波数応答は非常に鋭いピークと高い品質係数を持ちます。
誘導三点のアナログ。
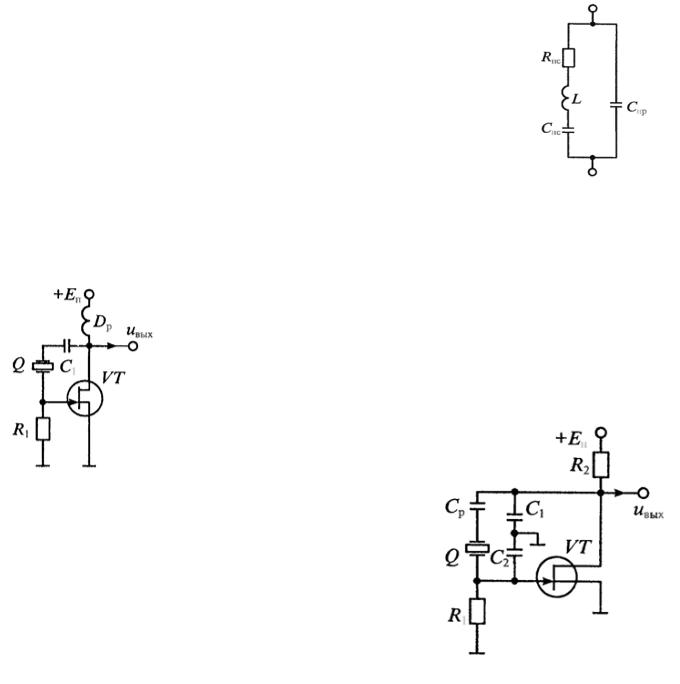
アンプによる水晶の品質係数の低下を防ぐために、電界効果トランジスタが使用されます。
この回路では、電界効果トランジスタVTのドレインとゲートとの間に水晶が接続されており、すなわち負帰還回路となっている。 ただし、共振周波数では、水晶はさらに 180° の位相シフトを導入し、フィードバックが正になります。
容量性3点式のアナログ。 このスキームでは、
励起、容量性分圧器が要素 C に使用されます 1
19) ウィーン橋を備えた発電機。
20) ダブル T ブリッジ付き発電機。